Published on Jun 05, 2023
Air Muscles
Air muscle is essentially a robotic actuator which is replacing the conventional pneumatic cylinders at a rapid pace. Due to their low production costs and very high power to weight ratio, as high as 400:1, the preference for Air Muscles is increasing. Air Muscles find huge applications in biorobotics and development of fully functional prosthetic limbs, having superior controlling as well as functional capabilities compared with the current models.
Robotic actuators conventionally are pneumatic or hydraulic devices. They have many inherent disadvantages like low operational flexibility, high safety requirements, and high cost operational as well as constructional etc. The search for an actuator which would satisfy all these requirements ended in Air Muscles. They are easy to manufacture, low cost and can be integrated with human operations without any large scale safety requirements. Further more they offer extremely high power to weight ratio of about 400:1. As a comparison electric motors only offer a power ration of 16:1. Air Muscles are also called McKibben actuators named after the researcher who developed it
The current form air muscles were developed by the Bridgestone Company, famous for its tires. The primary material was rubber i.e. the inner tube was made from rubber. Hence these actuators were called ‘Rubbertuators’. These developments took place around 1980s.
Later in 1990s Shadow Robotic Company of the United Kingdom began developing Air Muscles. These are the most commonly used air muscles now and are associated with almost all humanoid robotic applications which were developed recently. Apart from Shadow another company called The Merlin Humaniform develops air muscles for the same applications, although their design is somewhat different from the Shadow muscles.
Working
The inner rubber tube is inflated by entering air at a pressure, usually limited to 3.5 bar. The movement of this tube is constrained by the braid. When the tube gets inflated it experiences a longitudinal contraction. This would create a pull at both ends of the tube. Usually one end of the tube will be attached to somewhere so that force can be applied from one end. This pull when effectively utolised could provide the necessary motion. The working of the Air Muscle closely resembles that of the natural muscle and hence the name Muscle given to it along with Air. The figure below shows the physical appearance of the muscle at different stages of its working.
The Air Muscle consists of an inner rubber tube, which is often made from pure rubber latex. It is surrounded by a braided mesh.
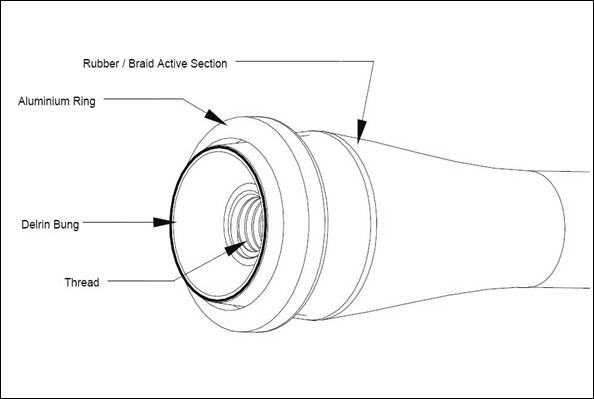
The header at each end of the muscle consists of an Aluminium ring, and a Delrin plastic bung, with a female thread. This thread can be used as a means of attachment, and to allow air into or out of the muscle. The muscle is supplied with two Delrin fittings also.
Dynamic Properties
To measure the force-velocity properties of the McKibben actuator, a series of experiments were conducted with the axial-torsional Bionix (MTS Systems Corp., Minnesota, U.S.A.) tensile testing instrument. Actuators of three sizes were constructed and tested. Each experiment measured the force output at a constant pressure over the contraction range at various velocities. One end of the actuator was rigidly attached to the load cell while the other end was moved in response to the instrument’s digital controller. Step velocity profiles were applied such that one end of the actuator was rapidly accelerated and held to a constant velocity until the end of the actuator’s working length was reached. Input step velocity profiles tested included 1, 10, 25, 50, 100, 150, 200, 250, and 300 mm/s for concentric contractions and 1, 10, 25, 50, 100, and 150 mm/s for eccentric contractions. Up to 500 mm/s is possible; however, instantaneous fluctuations in velocity of 15 percent were measured during trails at 500 mm/s. The magnitude of these fluctuations decreased at lower velocities, and was less than 9 percent at 300 mm/s and 6 percent at 200 mm/sec. This anomaly is thought to arise from the hydraulic pump.
Experimental Results
The experimentally measured output force of a single McKibben actuator, plotted as a function of both length and velocity, is shown in figure 4. The results shown are from an actuator whose nominal braid diameter was ¾ inch and constructed with a natural latex bladder. The actuator pressure was 5 bar and the original, resting state length of the actuator was 180 mm. The output force is clearly a function of length, but not of velocity. Similar results were obtained at lower pressures and with the other two sized actuators.
These measurements are taken when the muscle is fully stretched out, under a load of at least 50N, and a pressure of 0 bar.
Hole – Hole Spacing 290mm
Total Muscle Length 250mm
Active Length 230mm
1: The Hole-Hole spacing is the distance between the holes in the fittings at either end of the muscle. This is adjustable, as the fittings can be screwed in or out. They can also be removed entirely, creating a more compact muscle. Use an M10 screw instead, and remember to use PTFE tape to ensure a good seal.
2: The Total Muscle Length is the length of the whole muscle, excluding the fittings.
3: The Active Length is the length of the part of the muscle which contracts under pressure, and does not include the headers
Advantages of Air Muscles
Power to weight ratios in excess of 1 kW/kg, by way of comparison, electric drives typically has some 100 W/kg A varying force-displacement relation at constant gas pressure, contrary to pneumatic cylinders, which results in a muscle-like behavior; an adjustable compliance, due to gas compressibility and the dropping force-displacement characteristics
A maximum displacement or stroke of up to 50% of initial length
The absence of friction and hysteresis, as opposed to other types of PAMs
The ability to operate at a wide range of gas pressures, and thus to develop both very low and very high pulling forces
The possibility of direct connection to a robotic joint, i. e. without having to use any gears, because of their high output forces at all speeds.
Some of the advantages spelt out by the shadow company typical to their products are:-
Lightweight - Air Muscles weigh as little as 10 gm - particularly useful for weight-critical applications
Lower Cost - Air Muscles are cheaper to buy and install than other actuators and pneumatic cylinders
Smooth - Air Muscles have no 'stiction' and have an immediate response. This results in smooth and natural movement.
Flexible - Air Muscles can be operated when twisted axially, bent round a corner, and need no precise aligning.
Powerful - Air Muscles produce an incredible force especially when fully stretched.
