Published on Jun 05, 2023
Welding Robots
Welding being the major asset and salvation for mechanical engineering, the seminar is all about the automation of major welding processes used in industries using robots, which was hitherto done manually under hazardous and perilous working environs. The seminar dwells with two major industrial welding processes namely continuous arc welding process and spot welding process. It also connects with essential features of the robots used in these welding processes and also the advantages and disadvantages of these industrial robotic welding processes.
Automation and robotics are two closely related technologies. In an industrial context, we can define automation as a technology that is concerned with the use of mechanical, electronics and computer-based systems in the operation and control of production. Examples of this technology include transfer lines, mechanized assembly machines, feed back control systems, numerically controlled machine tools, and robots. Accordingly, robotics is a form of industrial automation
There are three broad classes of industrial automation: fixed automaton, programmable automation, and flexible automation. Fixed automation is used when the volume of production is very high and it is therefore appropriate to design specialized equipment to process the product very efficiently and at high production rates. A good example of fixed automation can be found in the automobile industry, where highly integrated transfer lines consisting of several dozen work stations are used to perform machining operations on engine and transmission components. The economics of fixed automation are such that the cost of the special equipment can be divided over a large number of units, and resulting unit cost are low relative to alternative methods of production. The risk encountered with fixed automation is this; since the initial investment cost is high, if the volume of production turns out to be lower than anticipated, then the unit costs become greater than anticipated. Another problem in fixed automation is that the equipment is specially designed to produce the one product, and after that products life cycle is finished, the equipment is likely to become obsolete. For products with short life cycle, the use of fixed automation represents a big gamble.
INTRODUCTION
Programmable automation is used when the volume of production is relatively low and there are a variety of products to be made. In this case, the production equipment is designed to be adaptable to variations in product configuration. This adaptability feature is accomplished by operating the equipment under the control of “program” of instructions which has been prepared especially for the given product. The program is read into the production equipment, and the equipment performs the particular sequence of processing operations to make that product. In terms of economics, the cost of programmable equipment can be spread over a large number of products even though the products are different. Because of the programming feature, and the resulting adaptability of the equipment, many different and unique products can be made economically in small batches.
There is a third category between fixed automation and programmable automation, which is called “flexible automation”. This is more suitable for the mid volume production range. It must be programmed for different product configurations, but the variety of configurations is usually non-limited than for a programmable configuration
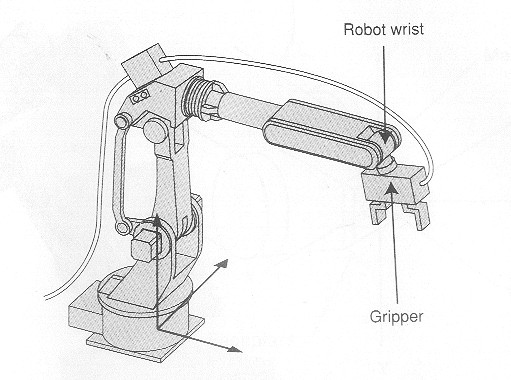
Of the three types of automation, robotics coincides most closely with programmable automation. An industrial robot is a general-purpose, programmable machine which possesses certain human like characteristics of present-day robots is their movable arms. The robots can be programmed to move its arm through a sequence of in order to perform some useful task. It will repeat that motion pattern over and over until reprogrammed to perform some other task. Hence the programming feature allows robots to be used for a variety of different industrial operations. Like machine loading and unloading, spot welding, continuous arc welding, spray painting etc
Why Continuous Robotic Arc Welding?
Arc welding is performed by skilled workers who are assisted by a person called fitter. The purpose of the fitter is to organize the work and fixture the parts of the welder. The working condition of the welder is typically unpleasant and hazardous. The arc from the welding process emits ultra-violet radiations which is injurious to human vision. As a result welders are required to wear eye protection in the form of a welding helmet with a dark window. The dark window filters out the dangerous, but it so dark that the welder is virtually blind while wearing the helmet except when the arc is struck. Other aspects of the process are also hazardous. The high temperature created in arc welding and the resulting molten metals are inherently dangerous. The high electric current used to create the arc is also unsafe. Sparks and smoke are generated during the process are a potential threat to operators. Because of the hazards for human workers in continuous arc welding, it is logical to consider industrial robots for the purpose.
BENEFITS OF ROBOT ARC WELDING
1. HIGHER PRODUCTIVITY
Factors that contribute to the increased rate when robots used in batch production is the elimination of fatigue factor. Robots do not experience fatigue in the sense that human workers do. A robot can continue to operate in the entire shift with need of periodic rest breaks.
2. IMPROVED SAFTEY AND QUALITY-OF-WORK LIFE
Improved safety and quality-of-work environment result from removing the human operator from an uncomfortable, fatiguing and potentially dangerous work situation.
3. GREATER QUALITY OF PRODUCT
Greater product quality in robot arc welding results from the capability of the robot to perform the welding cycle with accuracy and repeatability than its human counterpart. This translates into a more consistent welding seam; one that is free of the start-and-stop builds up of filler metal in the seam that is the characteristic of many welds accomplished by human welders
Problems For Robots In Arc Welding
1. A related problem is that arc welding is often performed in confined areas that are difficult to access, such as insides of tanks, pressure vessels, and ship hulls. Humans can position in to these areas more readily than robots.
2. One of the most difficult technical problems is the variation in the dimensions of the parts in a batch production job. This type of dimensional variations means that the arc-welding path to be followed will change slightly from part to part.
3. Another technical difficulty is the variations in the edges and surfaces to be welded together. Instead of being straight and regular, the edges are typically irregular. This causes variations in the gap between the parts and other problems in the way the pieces mate together prior to the welding process.
Human welders are able to compensate for both these variations by certain parameters in the welding process. Industrial robots provided with sensors to monitor the variations in the welding process and the control logic to compensate for part and weld gap irregularities
Related Seminar Topics
- Nitro Shock Absorbers
- Paper Battery
- Pistonless Pump
- Pollution Less Engine
- Re-entry-of-Space-Vehicle
- Robotic Car
- Scramjet Engine
- Self Healing Robots
- Sensotronic Brake Control
